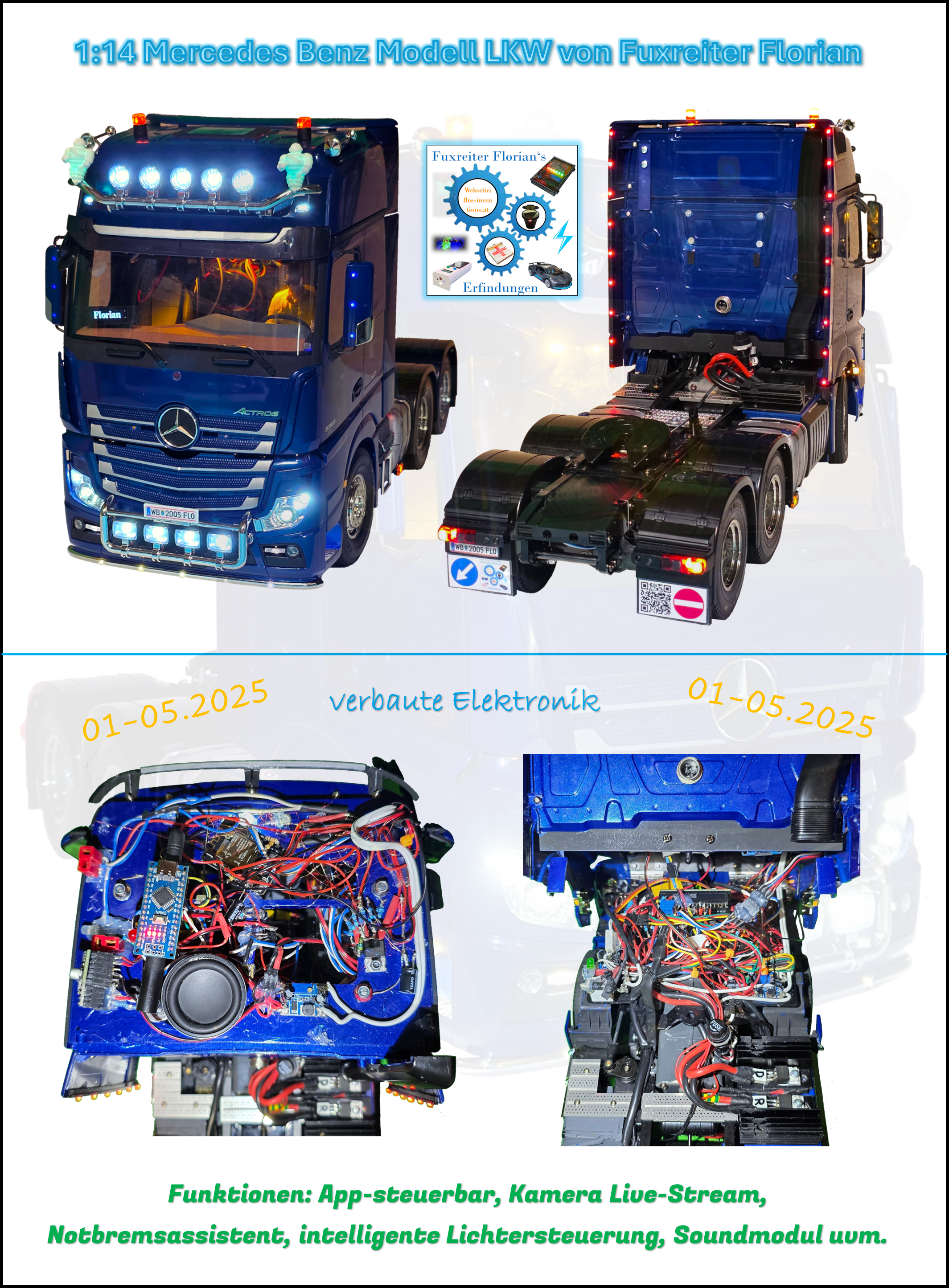
Funktionen im Überblick (= Kurzbeschreibung von der Hauptseite)
Dieses einzigartig entwickelte Modell eines Mercedes Benz LKWs im Maßstab 1 zu 14 überzeugt durch sein innovatives Design, das eingebaute Beleuchtungssystem und die fortschrittlichen Assistentsysteme, mit denen es ausgestattet ist. Die neumoderne, einfach zu bedienende Steuerung mithilfe einer Smartphoneapp (über WLAN-DIRECT) ermöglicht ein perfektes Fahrverhalten und eine übersichtliche Steuerung der Beleuchtungen, Blinker und weiterer Funktionen des LKWs. Die auf der Vorderseite eingebaute Kamera überträgt ein Live-Video in die eigens entwickelte Handyapp. Zudem ist der LKW mit einem Notbremsassistenten vorne und hinten ausgestattet, der mögliche Kollisionen erkennt und den Lastkraftwagen kurz vor einer Kollision automatisch bis zum Stillstand abbremst
Grundgedanke / Ideenursprung
Da die Steuerung vorgefertigter Systeme in einigen Bereichen stark eingeschränkt ist und sich die Zusammenführen diverser Funktionen (Abstandssensoren, Motor- und Lichtersteuerung, Videostream, ...) somit schwierig gestaltet, wurde die komplette Softwaresteuerung selbst entwickelt. Die Übersichtlichkeit der Bedienelemente in der Handyapp erweist sich zudem als deutlich verbessert, verglichen mit Fernsteuerungen, die nur Taster und Schalter ohne Beschriftungen besitzen. Zudem lassen sich somit Daten vom LKW, wie Geschwindigkeit, Akkustand, Stromverbrauch und sogar ein Live Videostream zusätzlich anzeigen.
Hardwareaufbau des LKWs
Einführung: Da dieses Modellfahrzeucg aus sehr vielen einzelnen Komponenten besteht, werden in den folgenden Unterpunkten alle Funktionen der Reihenfolge nach ganau beschrieben.
Stromversorgung: Ein Akkupack aus 4 einzelnen Lipoakkus mit jeweils 3,7V 3Ah Li-Ion Akkus beläuft sich auf eine Gesamtkapazität von 12Ah bei 3,7V Nennspannung. Der Motor bekommt die Spannung des Akkus direkt über den selbst entwickelten Motortreiber. Aufgrund der Esp32Cam und der Servos befindet sich im LKW zudem ein 5V Boost Converter. Außerdem ist ein selbstgebauter 3,3V Spannungsregler für das ESP32, das Beleuchtungssystem und die Abstandsmessung ebenfalls verbaut.
Motortreiber und Servos: Die Ansteuerung des Motors erfolgt über eine selbst entwickelte 4 Quadrantensteuerung, die aus Leistungsoptimierungsgründen aus 2*2 Stk. parallel geschalteten N-Kanal Mosfets und 2 Relaisschalterkontakten besteht. Je nach Fahrmodus ändert sich der Schaltstatus der 2 Relais. Die Mosfets bewältigen die Aufgabe, die Fahrgeschwindigkeit des LKWs zu regulieren. Die 3 eingebaten Servos sind für die Lenkung, das Schaltgetriebe und die Anhängerkupplung zuständig.
Beleuchtung: Die umfangreiche Beleuchtung unterstreicht das eindrucksvolle Erscheinungsbild des LKWs. Sogar an Positionen, wie in den Spiegeln sind SMD-Leds vorzufinden. Die Warn- / Drehleuchten am Dach des LKWs werden mit je 4 orangen SMD Leds, die von einem im Dach eingebauten Attiny85 angesteuert werden, realisiert. Zudem blitzen am Kühlergrill montierte orange Leds auf, wenn die Warnleuchten aktiv sind. Warmweiße Kurvenscheinwerfer, die sich nur ab einem bestimmten Lenkeinschlag aktivieren, ergänzen das Erscheinungsbild zusätzlich zu den in großer Stückzahl verbauten kaltweißen LEDs.
Abstandsmessung VORNE: Die Abstandsmessung vorne wird mithilfe eines Lidar Sensors realisiert. Bei diesem Sensor wird ein Impuls an Lichtstrahlen im Infrarotbereich mit einem Abstrahlwinkel von nur 2° (FAST wie ein Laser) auf ein Objekt ausgesendent. Dieses Objekt reflektiert einen Teil dieses Lichtstrahls wieder in Richtung des Lidar Sensors wo eine Empfängerdiode die Teile des Lichtstrahls erfassen kann. Mithilfe der Zeit, die der Lichtstrahl für die überwundene Distanz benötigt, kann sich eine Entfernung errechnet werden. Diesen Sensor gibt es als vorgefertigtes Modul, welches über UART mit einem Microkontroller kommunizieren und die Entfernung mitteilen kann. Beim Mercedes Benz Modell LKW sendet dieser verbaute Sensor Entfernungsdaten an das Arduino Nano über einen SoftwareSerial Port. HINTEN: Die Abstandsmessung hinten basiert auf einem ähnlichen Prinzip wie die Abstandsmessung vorne. Da der verbaute Attiny84 jedoch nicht über die erforderliche Prozessortaktfrequenz verfügt, um die Zeit eines Infrarotstrahls zu messen, wird hierbei die Stärke der Reflexion des Lichtstrahls gemaessen. Damit der Sensor unempfindlich gegen Sonnenlicht und andere Infrarotlichtquellen wird, erfolgt eine IR-Stärkenmessung ohne, und eine mit eingeschalteter IR-Diode. Durch den Vergleich beider Ergebnisse kann ein ungefährer Abstand berechnet werden, der jedoch ein wenig von der Oberflächenfarbe- und beschaffenheit des Hindernisses abhängt.
Ladeelektronik Die Ladeelektronik ist aus platztechnischen Gründen und der Anzahl belegter Pins auf den Microcontrollern ziemlich einfach gehalten. Hierbei ladet der LKW den Akku mit nur einer Schottky Diode, zwei parallel geschaltenen 1Ohm Widerständen und einem Relaisschalter zwischen dem Akku und der Ladung. Wenn die Spannung am Akku mehr als ca. 4,15 V erreicht aktiviert ein dafür vorgesehner Transistor ein Relais, welches die Verbindung von der Ladung zum LKW Akku trennt. Erst wenn die Spannung am Akku wieder unter ca. 3,8 V sinkt, schaltet das Relais die Ladung wieder hinzu, falls zuvor die 4,15V erreicht wurden. Ein Ab- und Anstecken der Ladung resettet diesen Vorgang und der Akku wird wieder geladen, falls die Spannung weniger als 4,15V beträgt.
eingebaute Controller > 2 Stk. ESP32 (einer für die generelle Steuerung des LKWs > Motortreiber, Lenkung, Blinker, ... der andere für die Motorsoundausgabe + als UART Kommunikationsmittelpunkt) > 1 Stk. ESP32Cam (zur Übertragung der Daten wie Gas, Lenkung, Lichterstatus,... und des Video Streams. Zudem werden über die Cam die Kurvenlichter und Warnleuchten angesteuert) > 1 Stk. Arduino Nano (für die Abstandsmessung vorne und die Sprachausgaben) >1 Stk. Attiny84 (zur Steuerung der Rücklichter, Bremslichter, Rückfahrscheinwerfer und für die in 2-facher Ausführung vorhandene Abstandsmessung hinten) HINTEN:
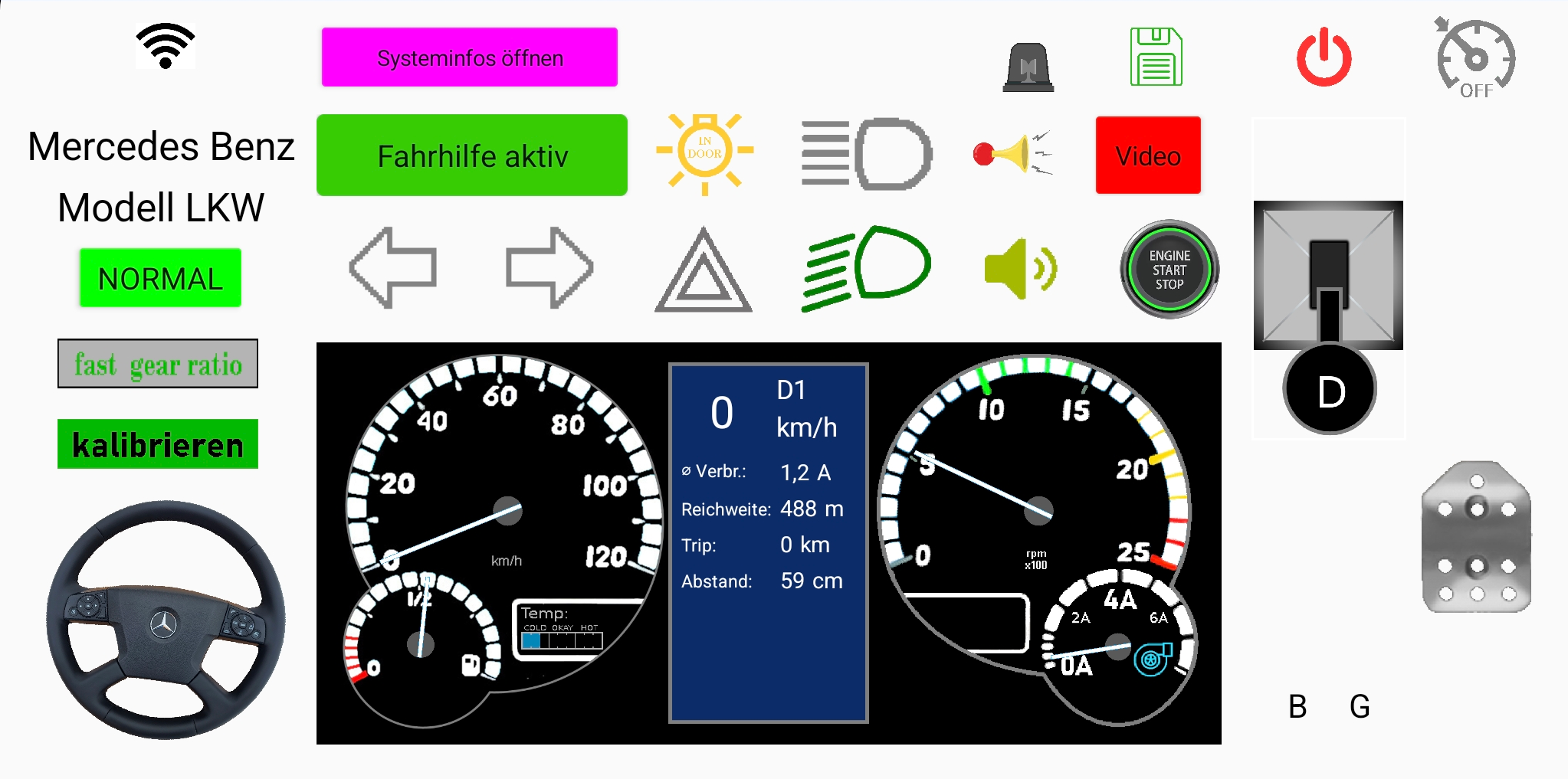
Software Handyapp / Fernbedienung
Verbindung:
Die Steuerung des LKWs wird mithilfe einer 2,4 Ghz WLAN Verbindung gewährleistet. Das im Modell LKW verbaute Esp32Cam Modul generiert als Access Point ein WLAN mit dem Namen "Mercedes_Benz_Modell_LKW" auf Kanal 6 mit 40 Mhz Bandbreite. Verbindet sich nun ein Client (z.B. ein Smartphone) mit diesem WLAN, kann dieser Daten an den LKW senden und auch empfangen. Zurzeit ist das Modul so konfiguriert, dass maximal 1 verbundener Client auf den Kamerastream, jedoch 2 Clients zur selben Zeit auf die Steuerung (Motor, Lenkung, Lichter, ...) zugreifen können. Somit kann der LKW entweder klassisch mit einer dafür entworfenen Fernsteuerung ODER ausschließlich mit der Handyapp ODER mit Handyapp und Fernsteuerung gleichzeitig gesteuert werden. Bei der Hybridsteuerung, wo Handyapp und Fernsteuerung gleichzeitig auf das WLAN des LKWs zugreifen, wird Gas, Lenkung und Fahrmodus nur von der Fernsteuerung übernommen. Alle anderen Funktionen, wie dei Lichtersteuerung werden live zwischen den beiden Geräten synchronisiert.
Handyapp:
Die Handyapp für den LKW wurde mithilfe von MIT App Inventor entwickelt. Mithilfe eines Software Lenkrades und eines kombinierten Gas- und Bremssliders erfolgt die Steuerung des LKWs. Zudem werden die Zustände von Beleuchtung, Blinker usw. übersichtlich angezeigt und können auch geändert werden. Eine eindrucksvolle Darstellung von Geschwindigkeit, Akkustand usw. mithilfe von aufgewerteten Analogen Amartouren erfolgt ebenfalls. Zudem ist die Steuerung des Anhängers ausschließlich mit der App möglich, wenn dieser mit dem LKW verbunden ist. Hierbei können die Rampe, Stützen und Lichter des Anhängers gesteuert werden.
Selbst gebaute Fernbedienung:
Als Alternative zur Steuerung über das Mobiltelefon kann die speziell dafür entworfene Fernbedienung verwendet werden. Der rechte hintere Schalter steuert den Fahrmodus (R/P/D). Wenn der Gashebel im P Modus auf über 80% gestellt ist, wird der Leerlauf N eingelegt und der LKW lässt sich widerstandsfrei schieben, da er dann nicht mehr mit dem Getriebe verbunden ist. Durch einen Klick auf den Joystick wechselt man im Getriebe zwischen dem ersten und zweiten Gang. Dies ist nur im Stillstand möglich! Der linke hintere Taster dient zur Blinkersteuerung und Start des LKWs. (lange links = Warnblinkanlage, lange rechts = starten) Am verbauten OLED Display werden alle benötigten Daten und sogar Informationen wie Akkustand oder Geschwindigkeit des LKWs angezeigt. Die mittig oben vebaute LED zeigt die Signalstärke der Verbindung an. (grün = sehr gute Verbindung, gelb = schlechte Verbundung, rot = keine Verbindung zum LKW) Der rechte Joystick dient horizontal zur Lenkung und vertikal zur Betätigung von Lichthupe und Hupe bzw. zur Auswahl der Fahrassistenzmodis. Kalibriert kann die Lenkung durch ein Spindelpotentiometer auf der Rückseite der Fernsteuerung werden. Die Spannungsversorgung der Fernbedienung erfolgt über 4 AA Batterien / Akkus. Der Gashebel ist so aufgebaut, dass sich in den unteren 25%, Bremse und Leerlauf befinden und darüber in 255 Stufen die Motorleistung gesteuert werden kann.
Sebst gebauter Anhänger
Dieser umgebaute Flachbettanhänger wurde spezifisch auf den Mercedes Benz Modell LKW optimiert. Ein zusätzlicher Mikrocontroller (Arduino Nano) am Anhänger übernimmt die Steuerung der Anhängerfunktionen und kommuniziert über UART mit dem LKW. Der Auflieger verfügt über mehrere unterschiedliche Lichterszenen, die mit adressierbaren LEDs auf beiden Seiten des Anhängers realisiert und in der Steuerungsapp ausgewählt werden können. Funktionen wie Blinker, Rücklicht, Bremslicht, Rückfahrscheinwerfer werden synchron mit der Beleuchtung des LKWs angesteuert. Zudem lassen sich die Stützen elektrisch absenken und wieder hochfahren. Durch eine spezifisch entwickelte Rampe, die sich ebenfalls elektrisch öffnen und schließen lässt, können andere 1 zu 14 Fahrzeuge ohne Beschwerden auf den Anhänger fahren und transportiert werden.
Abschlussworte
Bilder auf dieser Webseite und ein zukünftig bald verfügbarer Film des LKWs sollen die Grundfunktionen genauer demonstrieren. Schaltpläne und Programmcodes sind aus Datenschutz- und Platzgründen nicht veröffentlicht. Für genauere Informationen wenden Sie sich bitte mit einer Mail an mich. Die Mailadresse finden Sie auf der "About" - Seite.